

1. 焊接机器人总体方案
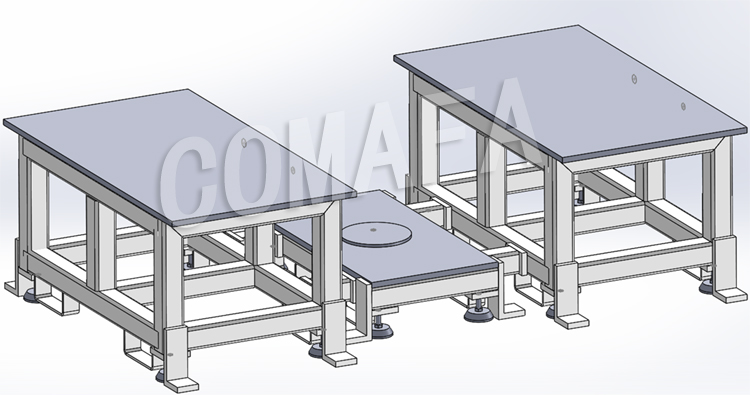
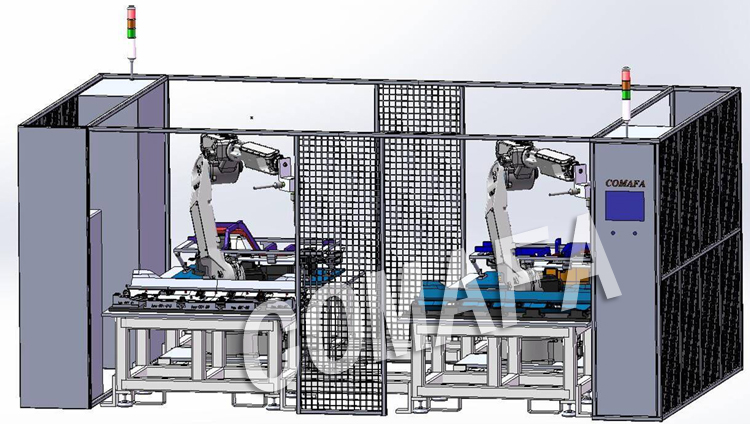
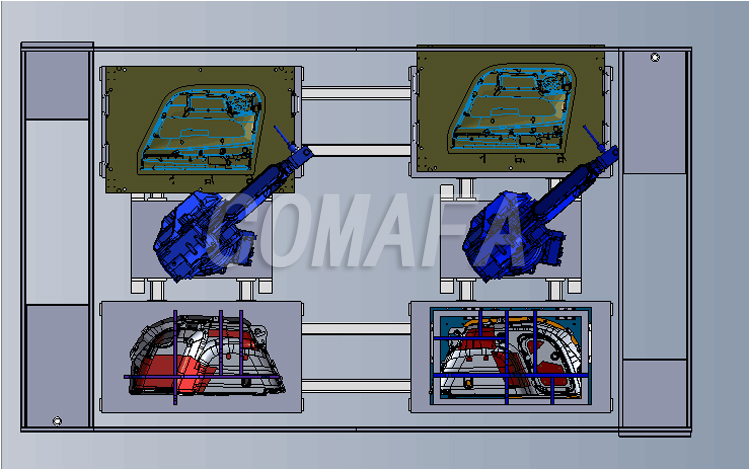
根据汽车塑料组件的尺寸、结构特点以及焊接(铆点、穿刺)的形式,焊接工件一般都在机器人臂展范围内。为降低成本和提高效率,在进行焊接机器人整体方案设计时,决定不采用翻转工装等机器人周边设备,而采用固定平台方式实现塑料工件的焊接,同时为提高焊接效率,焊接机器人系统方案采取一机多工位的模式,H型布置方式,如下图所示,即机器人本体固定在两自制焊接工作定位平台之间,工作时一工位焊接机器人对人一侧工件进行自动焊接,另一工位可以装卸工件,交替进行作业,保证机器人连续不停工作。
2. 机器人本体选用
建议选择机器人“四大家族”品牌机器人,保证焊接机器人长期稳定工作,机器人工作范围内由围护栏保护,保证操作工人的安全性。
3. 焊接工艺的确定
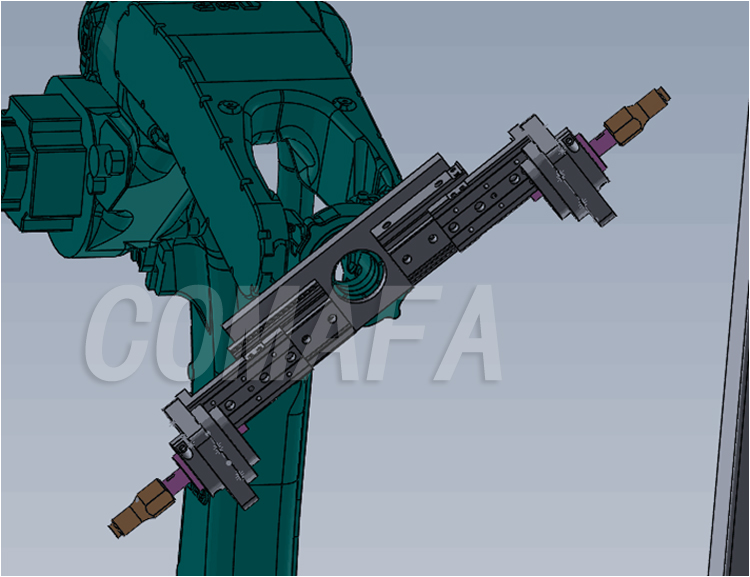
焊接工艺采用超声波焊接,壳实现汽车塑料件的点焊以及隔音棉穿刺焊,由超声波焊接组件带动定制的焊头完成焊接,非常利于焊接过程中的机械化和自动化。根据产品的不同焊接性状,一台机器人可以携带2套焊接组件,实用性更强。
4. 焊接参数确定?
汽车塑料件的焊接点位比较多,需要在尽量短的时间完成焊接,因此对焊接节拍有要求,超声波焊接的参数一般控制在2-3s,机器人的运动轨迹时间在2s,因此,单点焊接节拍为4s左右,不同的产品可以根据实际情况来调节,所有的参数调节均可设置。
超声波焊接机器人主要由以下部件组成:设备外框、支撑工装、移行装置(带升降功能)、焊接设备(包括超声波发生器等)、电控箱(包括操作显示屏)、焊接机器人、安全光栅等。
超声波焊接机器人工作站的设计方案可来电详询我司,我们会出具合适的焊接方案。